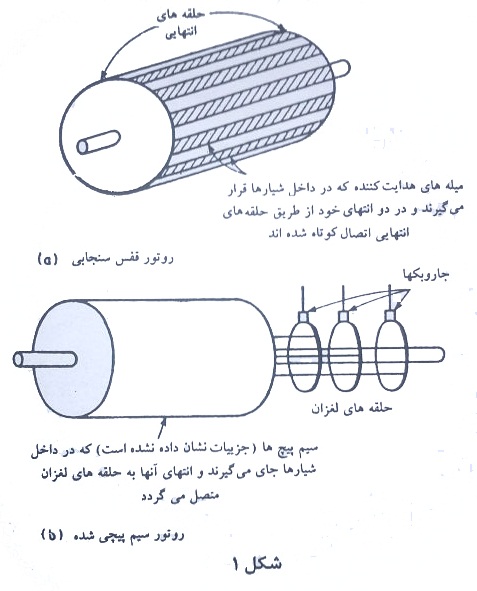
1- موتور قفس سنجابی
در این نوع، روتور دارای میله های مسی یا آلومینیومی بوده که درون شیارهای آن قرار گرفته اند. این میله ها مطابق شکل 1a در دو انتهای خود اتصال کوتاه هستند این نوع موتور القایی ارزان قیمت بوده اما دارای گشتاور راه اندازی پایینی است.
2- موتور با حلقه های لغزان (یا روتور سیم پیچی شده)
روتور دارای یک سیم پیچ سه فاز مناسب بوده که سرهای آن به حلقه های لغزان وجاروبکها متصل هستند (شکل 1b). این سرها معمولا هنگامی که موتور در حال کار است اتصال کوتاه میباشند. در لحظه راه اندازی برای بهبود گشتاور راه اندازی میتوان از طریق حلقه های لغزان به مدار روتور مقداری مقاومت اضافه نمود.
میدان گردان ایجاد شده توسط سیم پیچ های استاتور هنگام عبور از میله های روتور اتصال کوتاه شده، در آنها جریان القا میکند. این جریانهای القایی به نوبه خود میدانی را تولید نموده که با همان سرعت نسبت به میدان تولیدی استاتور در حرکت است. از بر هم کنش این دو میدان که نسبت به هم ساکن هستند گشتاور الکترومغناطیسی ایجاد میگردد.روتور در سرعتی نزدیک سرعت سنکرون حرکت میکند. در سرعت سنکرون چون سرعت نسبی بین میدان استاتور و روتور صفر است هیچ جریانی القا نشده وبنابراین گشتاوری نخواهیم داشت.
موتورهای ac تکفاز با توان پایین (کسر کیلووات) وولتاژ پایین استفاده میشوند.
این موتورها برمبنای همان اصول موتورهای سه فاز عمل نموده اما میدانهای تکفاز پالسی شکل در آنها باعث افزایش تلفات، کاهش گشتاور موتور وافزایش سطح نویز میگردند.
یک ماشین القایی که به شبکه متصل است در صورتی که در سرعت سوپر سنکرون به حرکت درآورده شود میتواند به عنوان یک مولد عمل نموده و توان حقیقی الکتریکی به شبکه ارایه دهد. مولدهای القایی در نیروگاههای بادی و کاربردهای فضایی مورد استفاده قرار میگیرند.
عایق یک ماشین آسیب پذیرترین قسمت آن است. عایقها نمیتوانند درجه حرارت های بالاتر از یک مقدار مشخص را تحمل کنند. برای یک اندازه مشخص، افزایش دمای حالت ماندگار با استفاده از درجه بارگزاری ماشین، تلفات متناظر با آن نحوه تهویه تدارک دیده شده محاسبه میگردد. بنابراین حداکثر بارگذاری برای یک اندازه مشخص از ماشین توسط افزایش دمای مجاز که وابسته به کلاس عایقی بکار رفته است محدود میگردد. در ماشینهای dc با سرعت بالا، کموتاسیون ضعیف حتی ممکن است قبل از رسیدن به دمای مجاز عامل محدود کننده محسوب شود. خود سرعت نیز به دلیل نیروهای سانتریفوژ ایجاد شده میتواند در ماشینهای با سرعت بالا یک عامل محدود کننده باشد. این عامل بخصوص در ماشینهای dc با ساختار آرمیچر پیچیده بیشتر خود را نمایان میسازد. به دلیل ظرفیت حرارتی بالا، ماشینها قادر هستند که مقداری اضافه بار را در مدت زمانهای کوتاه تحمل کنند.
کنترل موتور
تنوع بسیار گسترده ای در اجزا و روشهای کنترل ماشینهای گردان وجود دارد. هدف کنترل موتور میتواند به سادگی توقف وراه اندازی موتور یا کنترل یک یا چند پارامتر خروجی آن مانند سرعت محور، موقعیت زاویه ای، شتاب، گشتاور محور یا توان خروجی مکانیکی باشد. با توسعه سریع قطعات توان حالت- جامد، مدارات مجتمع ومدولهای کامپیوتری ارزان قیمت، گستره، کیفیت ودقت روشهای کنترل موتورهای الکتریکی بسیار بالا رفته است. امروزه ماشینها ودیگر سیستمهای الکترو مکانیکی با بالاترین دقت وقابلیت اطمینان ممکن را میتوان در کاربرد های فضایی وهسته ای یافت. با استفاده از مبدل های الکترونیک قدرت، طرحهایی پیشنهاد شده است که میتواند در عرض چند ثانیه موتورهای dc با توان در حدود مگاوات را راه اندازی، متوقف یا معکوس نماید. در نهایت همانطور که استفاده از منابع انرژی ارزان قیمت غیر متعارف وتجدید پذیر مانند انرژی خورشیدی، بادی وغیره افزایش میابد، نیاز به مبدلهای الکترومکانیکی مناسب به همراه مشخصه های تطبیقی احساس میگردد.
مسایل اقتصادی وسایر ملاحظات
مانند موضوعات دیگر مسائل اقتصادی یکی از مهمترین ملاحظات در انتخاب ماشینهای الکتریکی وروش کنترلی مورد استفاده است. در این حالت باید بین قیمت اولیه و هزینه عملکرد و نگهداری مصالحه ای انجام شود. تصمیم گیری جهت استفاده از موتورهای گران قیمت با راندمان بالا مشخصا هزینه صرف شده جهت انرژی را افزایش میدهد. ترانسفورماتورها نویز مغناطیسی تولید میکنند. ماشینهای الکتریکی علاوه بر این نویز دارای نویزهای مکانیکی هستند که از بلبرینگ ها، وسایل تهویه وغیره ایجاد میشوند. امروزه حد مجاز نویز یکی از پارامترهای مهم در انتخاب موتورهای الکتریکی است.